1998 / 1999
CAN-Bus-Steuerung von Servoachsen
https://www.htl-neufelden.at/diplomarbeiten/can-bus-steuerung/ 
Jahrgang
Projektpartner
HTL Neufelden
Maturanten
Leibezeder Mario
5BAT
Götzendorfer Peter
5BAT
Betreuer
Grömer Herbert
Zielsetzung:
Das flexible Handhabungsgerät ist mit 5 DC-Servo-Achsen ausgrüstet. Damit sind Bewegungen in x-, y- und z-Richtung möglich. Zusätzlich kann das Objekt gedreht und geneigt werden. Zwei weitere Freiheitsgrade können durch die Ansteuerung einfacher DC-Antriebe genützt werden.
Die Steuerung des Handling-Geräts passiert über ein PC-Programm, das den gesamten Bewegungsablauf vorgibt. Das PC-Programm bietet die Betriebsarten:
-Verfahren des Handling-Geräts „von Hand“,
-Teach-In für das Speichern eines Bewegungsablaufes und
-Automatikbetrieb für das „Abspielen“ erlernter Bewegungen.
Die Gerätetechnik
Die Verbindung zwischen PC und den Antrieben erfolgt über einen CAN (=Controller Area Network) Feldbus. An diesen Bus befindet sich die gesamte Prozessperipherie bestehend aus Servo-Controller-Bausteinen sowie digitalen und analogen I/O-Baugruppen.
Das Softwaresystem Servo – Control
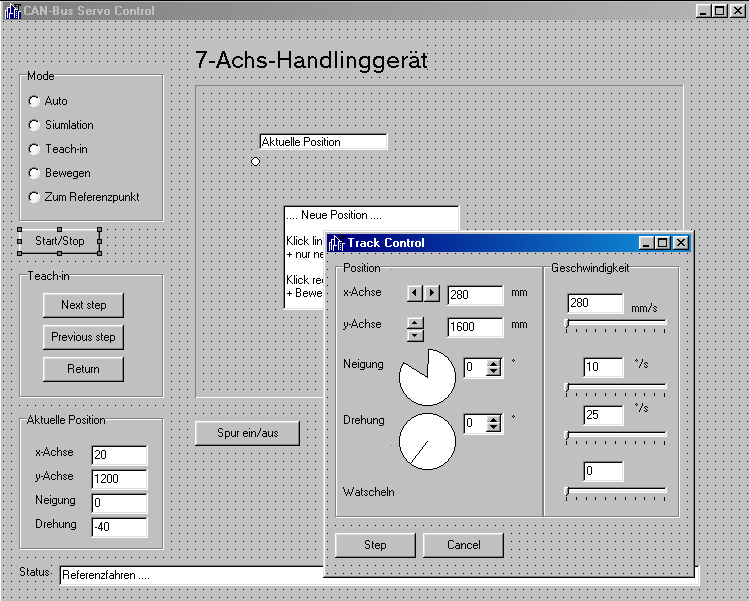
Für die Bedienung des Handling-Geräts wurde folgende Benutzeroberfläche geschaffen:
Die Betriebsart „Bewegen“:
Der Bewegungsablauf wird hier mittels Mausklick am Bildschirm vorgegeben. Gleichzeitig folgt das Handling-Gerät diesem Ablauf mit den eingestellten Gewschwindigkeiten. Drehen und Neigen wird mittels Drehzeiger definiert. Auf diese Weise kann das dynamische Verhalten des Geräts studiert werden.
Die Betriebsart „Teach-in“:
Wählt man „Teach-in“ und klickt infolge „Start, so werden alle folgenden Schritte „abgefahren“ und gleichzeitig abgespeichert. „Previous Step“ erlaubt dabei auch Schritte zurückzunehmen und auf diese Weise Korrekturen im Ablauf anzubringen. Der „Teach-in“ Modus ist schließlich mit „Return“ abzuschließen. Dies bewirkt ein Wandern zur Startposition.
Die Betriebsart „Auto“:
Die Betriebsart „Auto“ kann dann angewählt werden (Klick auf „Auto“ und „Start“), wenn tatsächlich mit „Teach-in“ Modus eine gültige Bewegung gespeichert wurde. In diesem Fall läuft das Objekt zur Startposition und wiederholt endlos die gespeicherten Bewegungsschritte.
Optionell kann man den Ablauf auch am Bildschirm verfolgen.
Die Betriebsart „Simulation“:
Diese Betriebsart funktioniert wie „Auto“, nur dass hier der Bewegungsablauf ausschließlich am Bildschirm angezeigt wird.
HTL-Neufelden
HTL-Neufelden
Höferweg 47
A-4120 Neufelden
![]()
Tel. 07282-5955
Fax 07282-5955-40
info@htl-neufelden.at
© Copyright - HTL-Neufelden