2011 /2012
Autopilot für Modellflugzeug
https://www.htl-neufelden.at/es/diplomarbeiten/autopilot-fuer-modellflugzeug/ 
Jahrgang
Projektpartner
Wagner Christof
Maturanten
Wagner Michael
5AAT
Wolkerstorfer David
5AAT
Betreuer
Schirz Walter
Wir setzten uns als Ziel eine System zu entwickeln, die es sowohl software- als auch hardwaretechnisch ermöglicht, ein Modellflugzeug völlig selbstständig fliegen zu lassen.
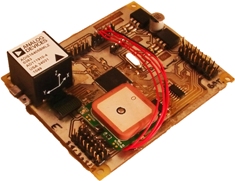
Durch die Verwendung verschiedener Sensoren und einem Mikrokontroller sollte es auf dieser Umgebung später möglich sein, ein Programm abzuarbeiten, welches das Flugzeug vollkommen autonom steuert. Verwendet wurden schließlich ein Gyro-Sensor zur Ermittlung der Lage des Flugzeugs im Raum, ein GPS-Modul zur Positionsbestimmung des Flugzeugs und ein Anemometer zur Ermittlung der Luftgeschwindigkeit am Flugmodell. Mit Hilfe der Werte aus diesen Sensoren ermöglicht es die Steuereinheit ein Modellflugzeug völlig ohne menschliches Eingreifen fliegen zu lassen. Zum Entwickeln dieser Steuerung verwendeten wir ein Flugmodell der Firma Multiplex, den TwinStar II.
Der Autopilot steuert in der Software festgelegte Wegpunkte an. Diese Wegpunkte sind einfache GPS-Koordinaten, bestehend aus dem Längengrad, dem Breitengrad und der Höhe über dem Meer.
Der Modellflieger folgt also einer Route aus diesen Wegpunkten. Dabei gleicht die Steuereinheit durch komplexe Regelalgorithmen leichte Windstöße und Luftlöcher aus. Auch die Ansteuerung der Wegpunkte erfolgt über mehrere Regelkreise. So ermöglicht unser System dem Anwender ein Modellflugzeug völlig autonom fliegen zu lassen. Der Start und die Landung des Modells sind weiterhin per Fernsteuerung durchzuführen. In ausreichender Höhe, im freien Luftraum, kann dann per Schalter an der Fernsteuerung in den Autopilot-Modus gewechselt werden.
Zum Schutz der Steuereinheit bei feuchter Witterung entwickelten wir eine Schutzhaube, welche sämtliche, auf dem Flugzeug platzierte, elektronische Bauteile vor Nässe schützt.
Außerdem wurde zum besseren Verständnis bei Präsentationen und in der Projektentwicklung und Dokumentation ein CAD-Abbild eines Modellfliegers konstruiert. Hier war es wichtig, dass die zu steuernden Komponenten des Flugzeugs, also die Ruder und die Motoren, deutlich zu erkennen waren.
Wir gaben unserem Projekt den Namen Autopilot. Der Begriff Autopilot soll den wichtigsten Aspekt unseres Projekts verdeutlichen, das selbständige, unabhängige Steuern des Flugzeugs.
Our aim was to develop a system which allows a model airplane to fly by wire.
By using various sensors and a microcontroller it should be possible to run a program which controls the aircraft completely autonomous. We use a Gyro-Sensor for determining the position in three dimensions. In addition to that we put in a GPS-Module to get the position of our model airplane. Further we fixed an anemometer to collect information about the speed of our model. We placed all this components on a circuit board and attached this to our test model, the TwinStar II of Multiplex.
From a PC there are waypoints transmitted to the microcontroller. These waypoints are simple GPS coordinates, consisting of longitude, latitude and height above the sea. The model aircraft systematically follows a route given by these waypoints. During the flight the aircraft compensates gusts of wind and air holes with the help of various control algorithms counted in the microcontroller. So our system allows the user to let a model airplane fly completely autonomous. The start and the landing have to be done manually via remote-control. If the airplane is in free air space, the user is able to change into the fly-by-wire-mode.
For protection of the electronic components we made a protective cover which shields the whole control unit.
In addition to that, we constructed a CAD image of a model airplane. It was important that the controllable parts of the model could be seen clearly. This CAD-Model was used in presentations to explain the job of the controlling unit.
We called our project Autopilot. This name should clarify the most important aspect of our project, the autonomous, independent control of the aircraft.
HTL-Neufelden
HTL-Neufelden
Höferweg 47
A-4120 Neufelden
![]()
Tel. 07282-5955
Fax 07282-5955-40
info@htl-neufelden.at
© Copyright - HTL-Neufelden