2014 / 2015
Frequenzumrichtermodelle Finalisierung
https://www.htl-neufelden.at/es/diplomarbeiten/frequenzumrichtermodelle-finalisierung/ 
Jahrgang
Projektpartner
HTL Neufelden
Maturanten

Aigner Matthias
5BHMIA
Betreuer

Brandl Rudolf

Bernhard Steffen
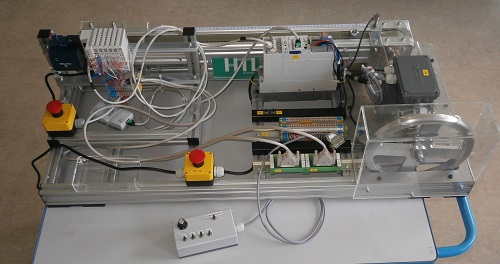
Da die alten Frequenzumrichtermodelle nicht mehr Stand der Technik waren, wurde beschlossen neue Modelle mit linearer Riemenachse für den Werkstättenunterricht zu bauen. Mit dieser Riemenachse soll das Referenzieren und Positionieren möglich sein. Die Aufgabe war es 5 Modelle zu konstruieren und zu fertigen mit denen Schüler der 4.Klassen, mithilfe praxisnaher Übungen, die Vorteile und Einsatzgebiete eines Asynchron Drehstrommotors mit Frequenzumrichter, erlernen und testen können.
Ursprünglich waren wir ein dreiköpfiges Team. Dieses Team bestand aus Dominik Floimayr, Markus Kunisch und aus mir Matthias Aigner. Da ich die vierte Klasse wiederholt habe konnte die Diplomarbeit im Jahr 2014 nicht beendet werden und deshalb habe ich sie im Jahr 2015 fertiggestellt. Die Konzeptphase und Konstruktion haben wir gemeinsam abgearbeitet. Zwei von fünf Stationen wurden von Markus und Dominik zusammengebaut und die weiteren drei habe ich fertiggestellt.
Insgesamt gibt es 4 Übungen:
- Übung 1: Die digitalen Eingänge des FUs werden mithilfe der Schaltbox über den D-Sub-Stecker angesteuert. Bei dieser Übung wird die Drehzahl des Motors über das Potenziometer geregelt und es können auch 3 fixe Drehzahlen eingestellt werden. Zusätzlich sind auch eine Drehrichtungsänderung und ein Schnellhalt möglich.
- Übung 2: Die digitalen Eingänge des FUs werden mithilfe einer Beckhoff SPS über den D-Sub-Stecker angesteuert. Bei dieser Übung können mittels der 4 digitalen Eingänge 3 Drehzahlen, Drehrichtungswechsel und ein Schnellhalt realisiert werden.
- Übung 3: Auf der Riemenachse Referenzieren und Positionieren. Durch das Fahren auf einen Anschlag wird ein Referenzierpunkt bestimmt. Von diesem Referenzierpunkt kann relativ oder absolut jede Position auf der Riemenachse angefahren werden.
- Übung 4: Mithilfe einer EtherCATverbindung den FU mit der Beckhoff SPS fernsteuern. Mithilfe eines Controlwords können Haltebremsen und Reglerfreigabe angesteuert werden und mithilfe eines Speedsetpoints kann jede beliebige Drehzahl im Bereich von -199% bis +199% der Nenndrehzahl realisiert werden.
The old frequency converter models were not at the technical standards anymore and so the school needs new frequency converter models. And so our task was to build 5 stations with a linear strap axis for students in the fourth class. With this strap axis it´s possible to find a reference point and you can stop this axis at any concrete position. The aim of this project is to teach the students the advantages and applications of an asynchronous motor with frequency converter.
There are four exercises for the students:
- First exercise: By using of a switch box we can control the digital inputs of the frequency converter. Acting out this exercise it´s possible to handle the number of revolutions with a potentiometer and additionally you can choose three fix numbers of revolution in both directions.
- Second exercise: With the use of a Beckhoff SPS we can control the digital inputs of the frequency converter. In this exercise you can also choose three fix numbers of revolutions in both directions.
- Third exercise: Executing this activity you are able to find a reference point on the linear strap axis and with the switch box you can stop this axis at any concrete position.
- Fourth exercise: With EtherCAT conversation it’s possible to remote control the frequency converter with a Beckhoff SPS. The control-word defines the task of the frequency converter and a speed-set-point controls the number of revolutions. It’s also potential to get the actual number of revolutions and the status of the frequency converter.

HTL-Neufelden
HTL-Neufelden
Höferweg 47
A-4120 Neufelden
![]()
Tel. 07282-5955
Fax 07282-5955-40
info@htl-neufelden.at
© Copyright - HTL-Neufelden